 (Fonte da imagem: Divultação: lcamtuf.coredump.cx)
(Fonte da imagem: Divultação: lcamtuf.coredump.cx)
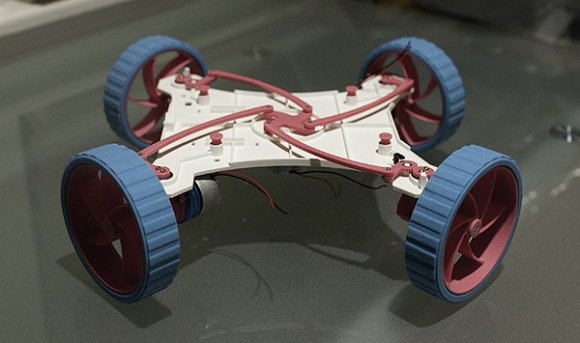
Entre uma verdadeira infinidade de designs possíveis propostos pela robótica profissional e amadora, é ainda possível que você não encontre o seu modelo? Com certeza. O perito em segurança de computadores Michal Zalewski, por exemplo, acaba de conceber um modelo com quatro rodas ajustáveis, o qual acredita que pode ser ideal para alterações rápidas de curso — sem a necessidade de uma infinidade de elementos caros e complexos.
Trata-se do Omnibot, um robô construído com três motores e quatro rodas praticamente independentes. A criação de Zalewski deve ser capaz de se mover em qualquer direção, executando ainda giros de até 360° com precisão.
O robô é construído com partes acopladas à mão e também vários motores e sensores. Duas rodas diagonalmente opostas são controladas por motores independentes, enquanto que as outras duas ficam responsáveis por dar a direção da estrutura. Além disso, um terceiro motor atua para sincronizar as quatro rodas.
Promissor ou não, parece que, de qualquer forma, Zalewski ainda não colocou a coisa toda para andar. O desenvolvimento do Omnibot pode ser acompanhado através deste link. Para mais tecnologia profissional e criações amadorísticas promissoras, fique ligado no Tecmundo.
Categorias
![Imagem de: Robô da Google faz cases para Galaxy Nexus [vídeo]](https://tm.ibxk.com.br/2012/2/materias/1995929144914.jpg?ims=164x118)

![Imagem de: Universidade cria moscas robôs capazes de se comportar como uma colônia [vídeo]](https://tm.ibxk.com.br/2012/2/materias/196071715856.jpg?ims=164x118)













