
Um dos maiores problemas que os pesquisadores de engenharia robótica enfrentam é o momento em que os robôs serão colocados para caminhar; afinal, dependendo do terreno em que o robô pisar, as coisas podem sair bem diferentes do que seriam no laboratório — principalmente se o solo for irregular.
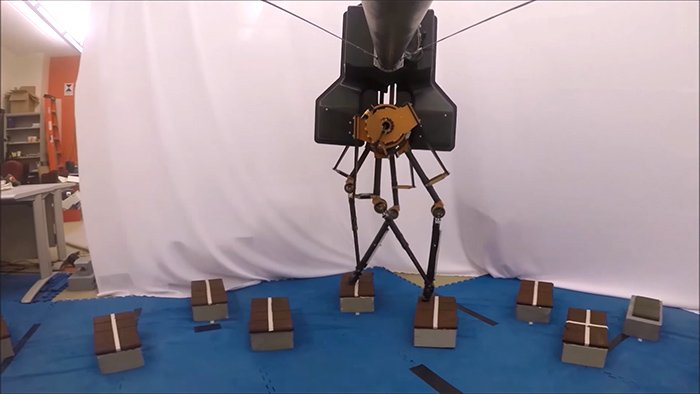
Felizmente, os pesquisadores do Grupo de Robótica Híbrida da Universidade da Califórnia alcançaram resultados interessantes com seus projetos: eles criaram robôs que não caem mesmo se estiverem andando em terrenos irregulares. Utilizando machine learning e robôs de tipos específicos, os pesquisadores conseguem "ensinar" as máquinas, para que possam caminhar por locais onde nunca tenham passado antes.
Acontece que os algoritmos que controlam o caminhar deles são complexos, uma vez que há restrições nos passos que não podem ser modificadas. Além disso, o movimento desses sistemas é governado por equações dinâmicas e complexas, e, da mesma forma que acontece com os humanos e animais terrestres, os robôs com pernas precisam ter algumas habilidades bem desenvolvidas para serem úteis em situações extremas, como resgates ou desastres.
Futuramente, estudos desse tipo podem ser de grande ajuda no desenvolvimento de robôs bípedes que poderão caminhar autonomamente por terrenos irregulares, tanto internos — escadas, por exemplo — quanto externos.
Fontes


















